MECH 4342, Mechatronics in AI-Driven Robotics
Unicycle Navigation Controller
A path-following controller for a nonholonomic warehouse robot that raises navigation success from 35 to 95-100 percent.
95% (was 35%)
Nominal success rate
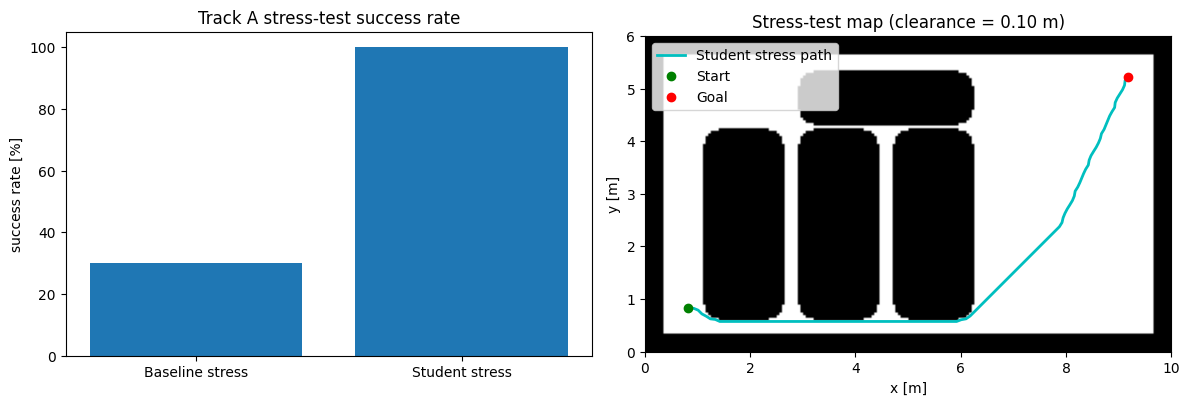
100% (was 30%)
Stress-test success rate
+60 to +70 pts
Improvement
20 Hz
Control rate
Overview
A path-following controller for a nonholonomic unicycle robot navigating a known warehouse map. A* planning with uniform path resampling, heading-error speed scheduling, and near-goal deceleration reached 95 percent success on the nominal test and 100 percent on the stress test, against 35 and 30 percent for the provided baseline.
Problem
The task was a path-following controller for a unicycle robot (radius 0.18 m) crossing a 10 m by 6 m warehouse occupancy grid from a fixed start (0.8, 0.8) to a goal (9.2, 5.2), arriving within 0.15 m while avoiding obstacles and respecting bounded inputs (v up to 0.5 m/s, omega up to 2.0 rad/s).
The robot is nonholonomic; it can drive and turn but not move sideways, so paths must respect its turning radius and sharp grid corners are not executable. The provided baseline controller succeeded 35 percent of the time on the nominal test and 30 percent under stress.
Approach
Path planning, path representation, and control were treated as equal parts of the design. A* searched the inflated grid (0.18 m robot radius plus safety margin) with 8-directional motion and a Euclidean heuristic to produce a globally optimal collision-free path.
The raw A* output, 198 sparse and unevenly spaced waypoints, was resampled into 114 uniformly spaced 0.10 m waypoints. Even spacing removes the large heading jumps that made the baseline overshoot and oscillate, giving the proportional heading controller continuous guidance.
Control Strategy
Four structural changes, not parameter tweaks, drove the result. First, speed scheduling scales forward velocity by normalized heading error, so a misaligned robot slows and reorients instead of arcing into obstacles, replacing the baseline binary stop-turn-go. Second, near-goal deceleration scales speed with distance over the final 0.5 m for an accurate terminal approach.
Third, tighter tolerances (goal 0.15 m, waypoint 0.06 m, 60 degree heading threshold) enforce closer path following. Fourth, higher gains (heading gain 1.5, omega max 2.0 rad/s) increase responsiveness. The speed-heading coupling keeps the higher gains stable, since the robot slows automatically when misaligned.
Results & Key Learnings
Across randomized initial headings, the controller reached 95 percent success on the nominal test (was 35 percent) and 100 percent on the stress test with larger inflation margins (was 30 percent), a 60 to 70 percentage-point improvement.
Robustness came from architecture, not fine-tuning. Coupling speed to heading error and goal distance produced a controller that is fast in open space and controlled in tight passages, the behaviour a mobile robot needs.
Next project
Eggshell-Alginate Microspheres